











คิวอาร์โค้ด

เกี่ยวกับเรา
สินค้า
ติดต่อเรา

โทรศัพท์

อีเมล

ที่อยู่
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน

ในอุตสาหกรรมการผลิตที่ทันสมัยที่แสวงหาประสิทธิภาพความแม่นยำและระบบอัตโนมัติการประยุกต์ใช้เทคโนโลยีเครื่องจักรกลซีเอ็นซีกำลังแพร่หลายมากขึ้นเรื่อย ๆ อย่างไรก็ตามกระบวนการโหลดและขนถ่ายของเครื่องมือเครื่องซีเอ็นซีมักจะกลายเป็นคอขวดที่ จำกัด ประสิทธิภาพการผลิต เพื่อที่จะเอาชนะข้อ จำกัด นี้ Fuweii Intelligent ได้เปิดตัวโซลูชันการโหลดและขนถ่ายหุ่นยนต์ CNC แบบคอมโพสิตโดยอัตโนมัติและปรับปรุงกระบวนการผลิตและปรับปรุงประสิทธิภาพการผลิตและความยืดหยุ่น
ภาพรวมโครงการ
โครงการนี้มีจุดมุ่งหมายเพื่อให้ได้การโหลดอัตโนมัติและการขนถ่ายวัตถุดิบในระหว่างการตัดเฉือนซีเอ็นซีรวมถึงกระบวนการตรวจสอบและทำความสะอาดที่จำเป็น ด้วยการแนะนำระบบแขนหุ่นยนต์ AGV แบบคอมโพสิต (ยานพาหนะที่มีไกด์อัตโนมัติ) รวมกับกล้องสแกนและกล้องวิสัยทัศน์การวางตำแหน่งการจัดการวัสดุที่แม่นยำและมีประสิทธิภาพและการจัดการกระบวนการสามารถทำได้
องค์ประกอบของระบบ
คอมโพสิต AGV ระบบแขนหุ่นยนต์: มีส่วนประกอบสำคัญเช่นตัว AGV, แขนหุ่นยนต์, กล้องสแกน, กล้องมองเห็นตำแหน่ง ฯลฯ
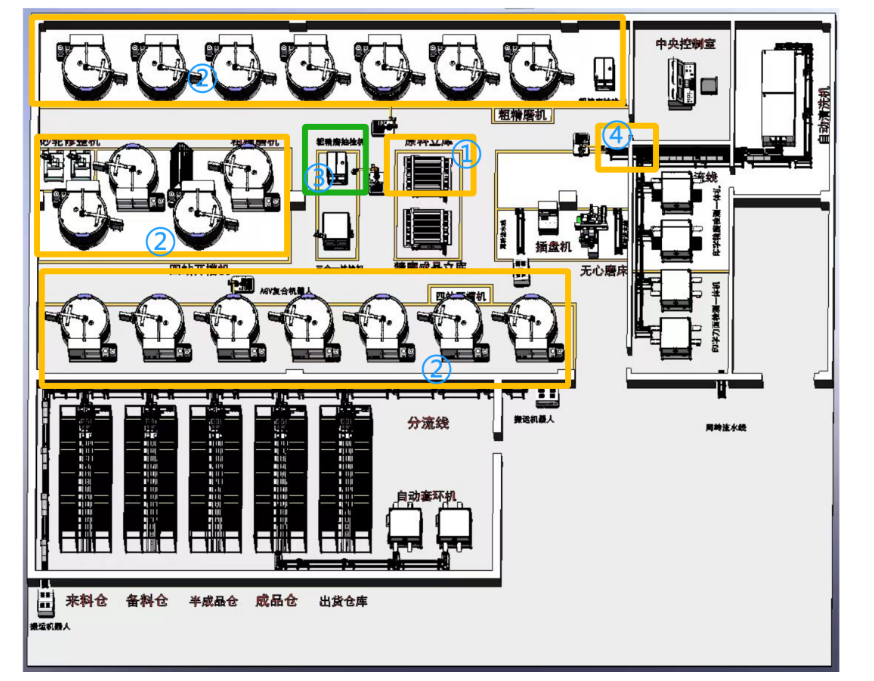
ระบบควบคุม: รับผิดชอบในการรับสัญญาณงานจากระบบอุปกรณ์พื้นที่②ควบคุมระบบ AGV หุ่นยนต์แขนเพื่อดำเนินการให้เสร็จสมบูรณ์เช่นการจับวัสดุการจัดการและการจัดวาง
ระบบสแกน: โดยการสแกนรหัส QR บนถาดวัสดุด้วยกล้องสแกนข้อมูลวัสดุสามารถป้อนและติดตามได้
ระบบการวางตำแหน่ง: การใช้กล้องวิสัยทัศน์การวางตำแหน่งเพื่อให้ได้ตำแหน่งที่แม่นยำและการนำทางของระบบแขนหุ่นยนต์ AGV
เวิร์กโฟลว์
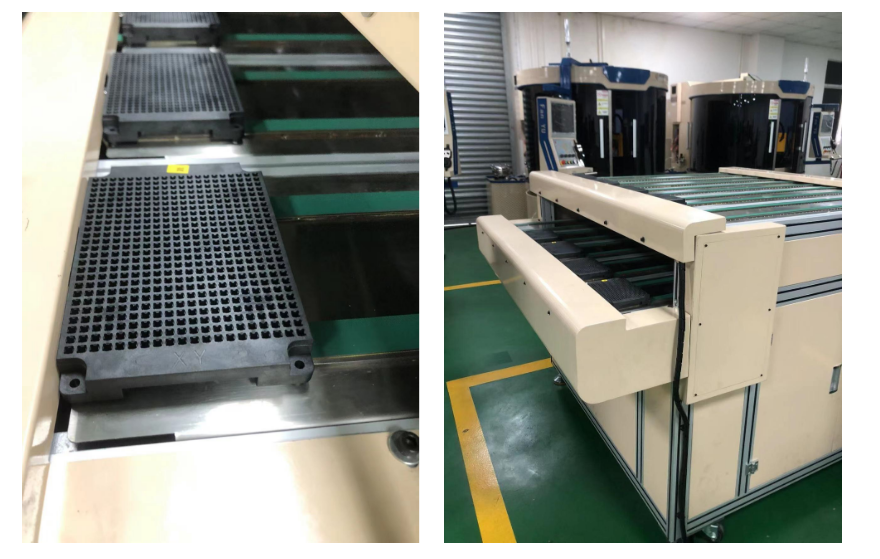
การคว้าวัตถุดิบ: ระบบแขนหุ่นยนต์ AGV คอมโพสิตไปที่ชั้นแรกของการจัดเก็บวัตถุดิบเพื่อคว้าวัสดุที่จะประมวลผลตามคำแนะนำของระบบควบคุม
ขั้นตอนการประมวลผล: ส่งวัสดุที่จับไปยังเครื่องในพื้นที่②วางไว้ตามตำแหน่งตำแหน่งภายในของเครื่องและรอการประมวลผล
กระบวนการทดสอบ (ไม่บังคับ): หากระบบออกคำขอทดสอบให้ส่งดิสก์แม่พิมพ์จากตำแหน่งการทดสอบของเครื่องในพื้นที่②ไปยังพื้นที่ตำแหน่งของอุปกรณ์ทดสอบในพื้นที่③สำหรับการทดสอบ หลังจากการตรวจสอบเสร็จสมบูรณ์แล้วให้ส่งดิสก์แม่พิมพ์กลับไปที่เครื่องในพื้นที่②
กระบวนการทำความสะอาด: วางวัสดุที่ประมวลผลโดยอุปกรณ์ในพื้นที่②บนสายพานลำเลียงของเครื่องทำความสะอาดในพื้นที่④และงานทำความสะอาดวัสดุจะเสร็จสมบูรณ์โดยอัตโนมัติโดยสายพานลำเลียง
การใช้งานด้านเทคนิค
ระบบแขนหุ่นยนต์ AGV คอมโพสิต: การใช้เทคโนโลยี AGV ขั้นสูงและเทคโนโลยีแขนหุ่นยนต์เพื่อให้ได้การจัดการวัสดุที่มีประสิทธิภาพและแม่นยำ
ระบบสแกน: การใช้กล้องสแกนประสิทธิภาพสูงเพื่อให้แน่ใจว่าอินพุตและการติดตามข้อมูลวัสดุที่แม่นยำ
ระบบการวางตำแหน่ง: การใช้เทคโนโลยีการวางตำแหน่งภาพขั้นสูงเพื่อให้ได้ตำแหน่งที่แม่นยำและการนำทางของระบบแขนหุ่นยนต์ AGV
ระบบควบคุม: การใช้ระบบควบคุมที่เชื่อถือได้เพื่อให้แน่ใจว่าการทำงานที่มั่นคงและความร่วมมือที่มีประสิทธิภาพของระบบทั้งหมด
ข้อได้เปรียบของระบบ
ระบบอัตโนมัติระดับสูง: ตระหนักถึงการโหลดและขนถ่ายการตรวจจับและการทำความสะอาดวัตถุดิบโดยอัตโนมัติในกระบวนการเครื่องจักรกลซีเอ็นซีปรับปรุงประสิทธิภาพการผลิต
ความแม่นยำสูง: โดยการใช้กล้องสแกนและการวางตำแหน่งกล้องภาพการป้อนข้อมูลที่แม่นยำและการวางตำแหน่งข้อมูลวัสดุที่แม่นยำสามารถทำได้
ความยืดหยุ่นที่แข็งแกร่ง: เวิร์กโฟลว์สามารถปรับได้อย่างยืดหยุ่นตามความต้องการที่แท้จริงเพื่อตอบสนองความต้องการการผลิตที่แตกต่างกัน
การตรวจสอบย้อนกลับที่แข็งแกร่ง: โดยใช้ระบบสแกนเพื่อติดตามและติดตามข้อมูลวัสดุตลอดกระบวนการทั้งหมดระดับของการจัดการคุณภาพผลิตภัณฑ์สามารถปรับปรุงได้
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน
