



")







คิวอาร์โค้ด

เกี่ยวกับเรา
สินค้า
ติดต่อเรา

โทรศัพท์

อีเมล

ที่อยู่
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน

ด้วยการพัฒนาอย่างรวดเร็วของเทคโนโลยีการผลิตอัจฉริยะการประยุกต์ใช้สายการผลิตอัตโนมัติในด้านการผลิตเหล็กแม่เหล็กกำลังแพร่หลายมากขึ้นเรื่อย ๆ อย่างไรก็ตามวิธีการโหลดแบบแมนนวลและการขนถ่ายมีปัญหามากมายเช่นประสิทธิภาพต่ำคุณภาพที่ไม่เสถียรอันตรายด้านความปลอดภัย ฯลฯ ซึ่งไม่สามารถตอบสนองความต้องการของการผลิตที่ทันสมัยได้อีกต่อไป Fuwei Intelligence ได้เสนอโซลูชันหุ่นยนต์คอมโพสิตสำหรับการโหลดและขนถ่ายเหล็กแม่เหล็กโดยมีวัตถุประสงค์เพื่อปรับปรุงประสิทธิภาพการผลิตลดต้นทุนแรงงานและให้ความปลอดภัยในการดำเนินงานด้วยวิธีการอัจฉริยะ

จุดปวดอุตสาหกรรม
ประสิทธิภาพการผลิตต่ำ: อาศัยการทำงานด้วยตนเองมันยากที่จะปรับปรุงประสิทธิภาพ
คุณภาพที่ไม่แน่นอน: ความแม่นยำและความสอดคล้องของการดำเนินงานด้วยตนเองนั้นยากที่จะรับประกัน
อันตรายด้านความปลอดภัยที่สำคัญ: อุบัติเหตุเช่นการบีบด้วยมือและผลกระทบมีแนวโน้มที่จะเกิดขึ้นระหว่างการดำเนินการ
สภาพแวดล้อมการทำงานที่ไม่ดี: ก่อให้เกิดภัยคุกคามต่อสุขภาพของผู้ประกอบการ
ภาพรวมของความต้องการและโซลูชันของลูกค้า
ความต้องการของลูกค้า: เราหวังว่าจะได้รับการโหลดอัตโนมัติและการขนถ่ายเหล็กแม่เหล็กผ่านวิธีการอัจฉริยะเพื่อปรับปรุงประสิทธิภาพการผลิตและความเสถียรด้านคุณภาพ ข้อกำหนดเฉพาะรวมถึงการเสร็จสิ้นการโหลดและการขนถ่ายผลิตภัณฑ์สองประเภทโดยใช้เวลารอบประมาณ 80 วินาทีเพื่อให้การโหลดและการขนถ่ายของสองสแต็คผลิตภัณฑ์เสร็จสมบูรณ์และมีข้อกำหนดที่แม่นยำสูง
ภาพรวมการแก้ปัญหา:
การเปลี่ยนมอเตอร์และคอนโทรลเลอร์เซอร์โว: ปรับปรุงประสิทธิภาพและความมั่นคงของหุ่นยนต์
พร้อมกับการนำทางเรดาร์แถบแสงและลำโพง: เพิ่มการนำทางการนำทางอิสระการมองเห็นและการโต้ตอบของหุ่นยนต์ของหุ่นยนต์
ออกแบบกริปเปอร์ที่กำหนดเอง: รวมกล้องและเซ็นเซอร์เข้าด้วยกันเพื่อให้ได้การจดจำที่แม่นยำและจับเหล็กแม่เหล็ก
เพิ่มประสิทธิภาพการจัดวางเค้าโครงและอุปกรณ์ของพื้นที่โหลดและขนถ่ายเพื่อให้แน่ใจว่าหุ่นยนต์สามารถทำงานให้เสร็จสมบูรณ์และมีประสิทธิภาพ
การดำเนินการและการเพิ่มประสิทธิภาพของแผน
การแปลงหุ่นยนต์คอมโพสิต:
เลือกมอเตอร์ประสิทธิภาพสูงและตัวควบคุมเซอร์โวเพื่อให้แน่ใจว่ามีความแม่นยำและความเสถียรของการเคลื่อนไหว
พร้อมกับการนำทางเรดาร์เพื่อให้ได้ตำแหน่งอิสระและการวางแผนเส้นทาง
ติดตั้งแถบไฟ LED และลำโพงเตือนเพื่อปรับปรุงการมองเห็นและการโต้ตอบ
ออกแบบ grippers ที่กำหนดเองที่รวมกล้องและเซ็นเซอร์เข้าด้วยกันเพื่อให้ได้การระบุที่แม่นยำและการจับเหล็กแม่เหล็ก
การเพิ่มประสิทธิภาพของพื้นที่โหลด:
คู่มือการออกแบบตำแหน่งคู่มือเพื่อนำทางเหล็กแม่เหล็กไปยังตำแหน่งที่กำหนด
ตั้งค่าเครื่องหมายตำแหน่งเดสก์ท็อปเพื่ออำนวยความสะดวกในการรับรู้หุ่นยนต์และการวางตำแหน่งของจุดจับ
การปรับปรุงพื้นที่การขนถ่ายวัสดุ:
ตั้งค่าเครื่องหมายวางตำแหน่งอุปกรณ์เพื่อให้แน่ใจว่าหุ่นยนต์วางแม่เหล็กอย่างถูกต้อง
ติดตั้งประตูแผงควบคุมไฟฟ้าและช่องเลื่อนควบคุมไฟฟ้าเพื่อป้องกันผู้ปฏิบัติงานจากการบาดเจ็บและได้รับการขับเคลื่อนอุปกรณ์อัตโนมัติ
ตรรกะการดำเนินการและการเพิ่มประสิทธิภาพกระบวนการ
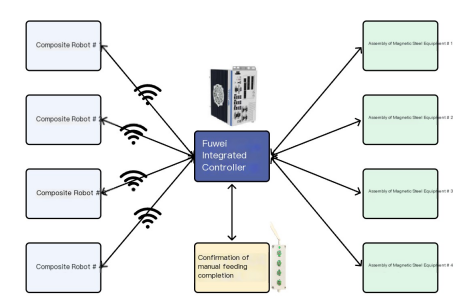
ตรรกะการดำเนินการของแผนทั้งหมดขึ้นอยู่กับการออกแบบกระบวนการของสายการผลิตอัตโนมัติเพื่อให้มั่นใจถึงความต่อเนื่องและประสิทธิภาพของเวิร์กโฟลว์ กระบวนการทั้งหมดถูกเรียกใช้โดยคำขอโหลดและหุ่นยนต์ดำเนินการดึงข้อมูลวัสดุตามสถานะของพื้นที่โหลด ในระหว่างกระบวนการเก็บและวางวัสดุการรับรู้ที่แม่นยำและการควบคุมแรงสามารถทำได้ผ่านกล้องและเซ็นเซอร์ที่รวมอยู่ในกริปเปอร์ เมื่อแม่เหล็กถูกวางไว้บนอุปกรณ์เรียบร้อยแล้วหุ่นยนต์จะยืนยันความสมบูรณ์ของการโหลดและดำเนินการต่อไปยังรอบต่อไป
ด้วยการใช้หุ่นยนต์คอมโพสิตอัจฉริยะ Fuwei สำหรับการโหลดเหล็กแม่เหล็กและการขนถ่ายมันสามารถแก้ปัญหาการโหลดด้วยตนเองแบบดั้งเดิมได้อย่างมีประสิทธิภาพและ
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน
