











คิวอาร์โค้ด

เกี่ยวกับเรา
สินค้า
ติดต่อเรา

โทรศัพท์

อีเมล

ที่อยู่
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน

ด้วยการพัฒนาอย่างต่อเนื่องของเทคโนโลยีการผลิตอัจฉริยะการประยุกต์ใช้สายการผลิตอัตโนมัติในด้านการผลิตเหล็กแม่เหล็กกำลังแพร่หลายมากขึ้นเรื่อย ๆ อย่างไรก็ตามวิธีการโหลดและขนถ่ายด้วยตนเองแบบดั้งเดิมมีปัญหาเช่นประสิทธิภาพต่ำคุณภาพที่ไม่เสถียรและอันตรายด้านความปลอดภัยที่สำคัญซึ่งไม่สามารถตอบสนองความต้องการของการผลิตที่ทันสมัยได้อีกต่อไป ในการตอบสนองต่อปัญหาเหล่านี้เราเสนอวิธีแก้ปัญหาการใช้หุ่นยนต์คอมโพสิตอัจฉริยะ Fuwei สำหรับการโหลดเหล็กแม่เหล็กและการขนถ่ายโดยมีวัตถุประสงค์เพื่อปรับปรุงประสิทธิภาพการผลิตลดต้นทุนแรงงานให้แน่ใจว่ามีความปลอดภัยในการดำเนินงานและบรรลุระบบอัตโนมัติและข่าวกรองในการผลิตเหล็กแม่เหล็ก
จุดปวดอุตสาหกรรม:
1. การพึ่งพาการทำงานด้วยตนเองสูงนำไปสู่ประสิทธิภาพการผลิตต่ำและคุณภาพที่ไม่แน่นอน
2. มีอันตรายด้านความปลอดภัยในระหว่างกระบวนการดำเนินการเช่นอุบัติเหตุเช่นการบีบด้วยมือและผลกระทบ
3. สภาพแวดล้อมการทำงานที่ไม่ดีเป็นภัยคุกคามต่อสุขภาพของผู้ประกอบการ
4. การดำเนินการด้วยตนเองเป็นเรื่องยากที่จะตอบสนองความต้องการการผลิตขนาดใหญ่และประสิทธิภาพสูง

ภาพรวมของความต้องการและโซลูชันของลูกค้า
ความต้องการของลูกค้า: ลูกค้าหวังที่จะบรรลุการโหลดอัตโนมัติและการขนถ่ายเหล็กแม่เหล็กผ่านหุ่นยนต์คอมโพสิตอัจฉริยะ Fuwei ปรับปรุงประสิทธิภาพการผลิตและความเสถียรด้านคุณภาพ ข้อกำหนดเฉพาะรวมถึงการเสร็จสิ้นการโหลดและการขนถ่ายผลิตภัณฑ์สองประเภทด้วยเวลารอบประมาณ 80 วินาทีเพื่อให้การโหลดผลิตภัณฑ์สองสแต็คเสร็จสมบูรณ์และมีข้อกำหนดที่มีความแม่นยำสูง
ภาพรวมการแก้ปัญหา
เราเสนอแผนการปรับปรุงต่อไปนี้เพื่อตอบสนองความต้องการของลูกค้าของเรา:
1. เปลี่ยนมอเตอร์และคอนโทรลเลอร์เซอร์โวเพื่อปรับปรุงประสิทธิภาพและความเสถียรของหุ่นยนต์
2. พร้อมการนำทางเรดาร์แถบแสงและลำโพงเพื่อเพิ่มการนำทางของหุ่นยนต์การมองเห็นและการโต้ตอบของหุ่นยนต์
3. การออกแบบกริปเปอร์แบบกำหนดเองที่รวมกล้องและเซ็นเซอร์เข้าด้วยกันเพื่อให้ได้การระบุที่แม่นยำและการจับเหล็กแม่เหล็ก
4. เพิ่มประสิทธิภาพเค้าโครงและการกำหนดค่าอุปกรณ์ของพื้นที่การโหลดและการขนถ่ายเพื่อให้แน่ใจว่าหุ่นยนต์สามารถทำงานให้เสร็จสมบูรณ์และมีประสิทธิภาพ
4、 การดำเนินการตามแผนปรับปรุงอย่างละเอียด
การแปลงหุ่นยนต์คอมโพสิต

เลือกมอเตอร์ประสิทธิภาพสูงและตัวควบคุมเซอร์โวเพื่อให้แน่ใจว่ามีความแม่นยำและความเสถียรของการเคลื่อนไหวของหุ่นยนต์
พร้อมกับการนำทางเรดาร์เพื่อให้ได้ตำแหน่งอิสระและการวางแผนเส้นทางของหุ่นยนต์
ติดตั้งแถบไฟ LED และลำโพงเตือนเพื่อเพิ่มการมองเห็นและการโต้ตอบของหุ่นยนต์
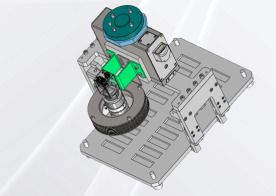
ออกแบบ grippers ที่กำหนดเองที่รวมกล้องและเซ็นเซอร์เข้าด้วยกันเพื่อให้ได้การระบุที่แม่นยำและการจับเหล็กแม่เหล็ก
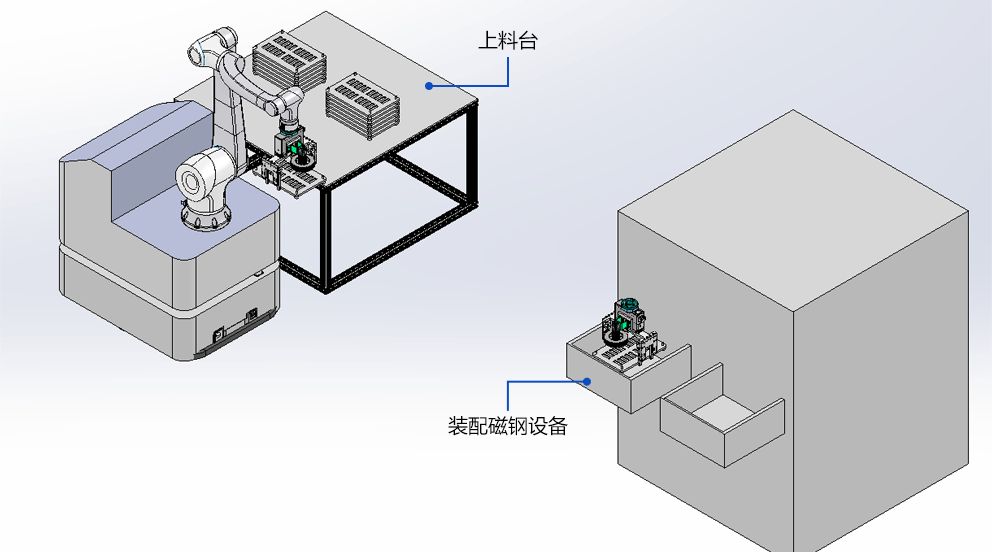
การเพิ่มประสิทธิภาพของพื้นที่โหลด
คู่มือการออกแบบตำแหน่งคู่มือเพื่อนำทางเหล็กแม่เหล็กไปยังตำแหน่งที่กำหนด
ตั้งค่าเครื่องหมายตำแหน่งเดสก์ท็อปเพื่ออำนวยความสะดวกในการรับรู้หุ่นยนต์และการวางตำแหน่งของจุดจับ
การปรับปรุงพื้นที่ขนถ่าย
ตั้งค่าเครื่องหมายวางตำแหน่งอุปกรณ์เพื่อให้แน่ใจว่าหุ่นยนต์วางเหล็กแม่เหล็กอย่างถูกต้อง
ติดตั้งประตูแผงควบคุมไฟฟ้าและช่องเลื่อนควบคุมไฟฟ้าเพื่อป้องกันผู้ปฏิบัติงานจากการบาดเจ็บและได้รับการขับเคลื่อนอุปกรณ์อัตโนมัติ
ตรรกะการดำเนินการและการเพิ่มประสิทธิภาพกระบวนการ
ตรรกะการดำเนินการของโซลูชันทั้งหมดขึ้นอยู่กับการออกแบบกระบวนการของสายการผลิตอัตโนมัติเพื่อให้มั่นใจถึงความต่อเนื่องและประสิทธิภาพของเวิร์กโฟลว์ กระบวนการทั้งหมดถูกเรียกใช้โดยคำขอโหลดและหุ่นยนต์ดำเนินการดึงข้อมูลวัสดุขึ้นอยู่กับว่าพื้นที่โหลดพร้อมหรือไม่ ในระหว่างกระบวนการเก็บและวางวัสดุการรับรู้ที่แม่นยำและการควบคุมแรงสามารถทำได้ผ่านกล้องและเซ็นเซอร์ที่รวมอยู่ในกริปเปอร์ เมื่อแม่เหล็กถูกวางไว้บนอุปกรณ์เรียบร้อยแล้วหุ่นยนต์จะยืนยันความสมบูรณ์ของการโหลดและดำเนินการต่อไปยังรอบต่อไป
ด้วยการใช้หุ่นยนต์คอมโพสิตอัจฉริยะ Fuwei สำหรับการโหลดเหล็กแม่เหล็กและการขนถ่ายเราสามารถแก้ปัญหาอย่างมีประสิทธิภาพของวิธีการโหลดด้วยตนเองแบบดั้งเดิมและวิธีการขนถ่ายปรับปรุงประสิทธิภาพการผลิตลดต้นทุนแรงงานและรับรองความปลอดภัยในการดำเนินงาน ในเวลาเดียวกันโซลูชันนี้ยังมีความยืดหยุ่นและความยืดหยุ่นสูงซึ่งสามารถปรับให้เข้ากับองค์กรการผลิตเหล็กแม่เหล็กของเครื่องชั่งและความต้องการการผลิตที่แตกต่างกัน
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน
