










คิวอาร์โค้ด

เกี่ยวกับเรา
สินค้า
ติดต่อเรา

โทรศัพท์

อีเมล

ที่อยู่
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน

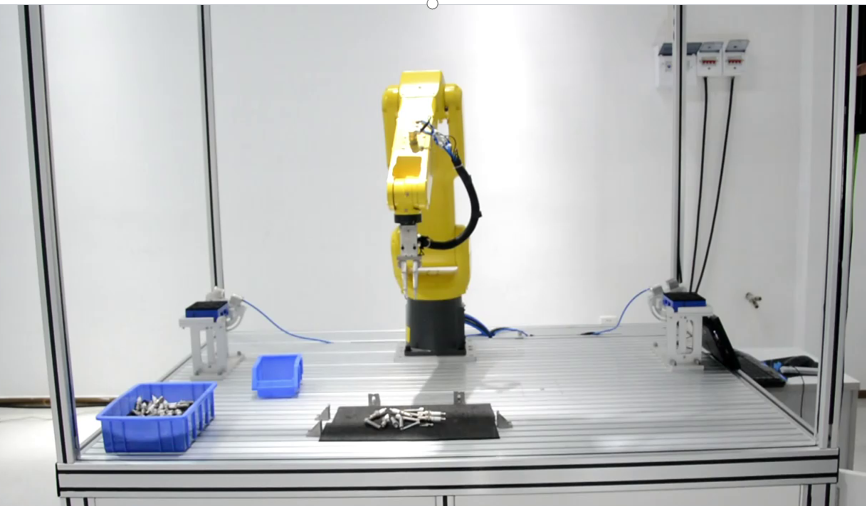
ด้วยการปรับปรุงอย่างต่อเนื่องของระบบอัตโนมัติการผลิตองค์กรชิ้นส่วนยานยนต์ขนาดใหญ่ได้เสนอความจำเป็นในการใช้หุ่นยนต์คอมโพสิตเพื่อการเรียงลำดับ BOLT ให้เสร็จสมบูรณ์เพื่อปรับปรุงประสิทธิภาพการผลิตและลดต้นทุนแรงงาน Fuwei Intelligent ใช้หุ่นยนต์คอมโพสิตรวมกับกล้องอุตสาหกรรม 3 มิติและตัวควบคุมประสิทธิภาพสูงเพื่อให้ได้การจับโบลต์อัตโนมัติซึ่งจะเป็นการปรับปรุงประสิทธิภาพการดำเนินงานโดยรวมของสายการผลิต
ปัญหาโครงการ
1. ข้อกำหนดที่มีความแม่นยำสูง: สลักเกลียวเป็นส่วนประกอบขนาดเล็กที่ต้องการหุ่นยนต์เพื่อระบุและเข้าใจได้อย่างแม่นยำหลีกเลี่ยงความเสียหายของผลิตภัณฑ์หรือการหยุดทำงานสายการผลิต
2. หุ่นยนต์จำเป็นต้องปรับตัวเข้ากับปัจจัยไดนามิกเช่นตำแหน่งชั้นวางที่แตกต่างกันและการเปลี่ยนแปลงในจุดจับ
3. ในขณะที่มั่นใจในความถูกต้องของส่วนผสมจำเป็นต้องเพิ่มประสิทธิภาพกระบวนการทำงานของหุ่นยนต์และปรับปรุงประสิทธิภาพการทำงานโดยรวม

สารละลาย
ด้วยการใช้กล้องอุตสาหกรรม 3 มิติและตัวควบคุมประสิทธิภาพสูงหุ่นยนต์สามารถค้นหาส่วนประกอบ Bolt ได้อย่างแม่นยำและปรับกลยุทธ์ที่จับได้แบบเรียลไทม์ผ่านการจดจำภาพเพื่อให้มั่นใจถึงความมั่นคงและความแม่นยำ
คอนโทรลเลอร์บูรณาการอัจฉริยะ Fuwei รวบรวมสัญญาณการประชุมเชิงปฏิบัติการเพื่อให้ได้การรวมกันอย่างราบรื่นระหว่างหุ่นยนต์และสายการผลิต การควบคุมหลายแกนพร้อมกันการปรับวิถีการเคลื่อนที่อย่างยืดหยุ่นตามการเปลี่ยนแปลงในแร็ควัสดุและจุดจับที่ปรับให้เข้ากับสภาพแวดล้อมแบบไดนามิก
เพิ่มประสิทธิภาพกระบวนการทำการบ้านลดเวลารอและปรับปรุงประสิทธิภาพการคว้า กำหนดเวลาการบ้านที่เหมาะสมและปรับปริมาณการคว้าและการประกอบตามความต้องการเพื่อตอบสนองความต้องการที่แท้จริงของสายการผลิต
กระบวนการดำเนินการ:
หลังจากได้รับคำขอคว้าวัสดุหุ่นยนต์คอมโพสิตเริ่มย้ายไปยังตำแหน่งผลิตภัณฑ์ที่กำหนด ถัดไปหุ่นยนต์จะทำการวางตำแหน่งด้วยภาพเพื่อให้แน่ใจว่าการรับรู้และการจับผลิตภัณฑ์ที่แม่นยำ ในระหว่างกระบวนการวางตำแหน่งหากระบบตรวจพบว่าจำนวนผลิตภัณฑ์นั้นน้อยกว่าค่าที่ตั้งไว้มันจะทำให้เกิดการเตือนภัยและพยายามเปลี่ยนตำแหน่ง หากการวางตำแหน่งประสบความสำเร็จหุ่นยนต์จะยังคงดำเนินการจับได้ หากการวางตำแหน่งล้มเหลวมันจะย้ายไปยังตำแหน่งของผลิตภัณฑ์ถัดไปและลองอีกครั้ง หลังจากจับได้สำเร็จหุ่นยนต์จะย้ายผลิตภัณฑ์ไปยังพื้นที่ขนถ่ายเพื่อดำเนินการขนถ่ายให้เสร็จสมบูรณ์ ตลอดกระบวนการทั้งหมดการวางตำแหน่งด้วยภาพและการจับเป็นขั้นตอนสำคัญทำให้มั่นใจได้ว่าหุ่นยนต์สามารถทำงานได้อย่างมีประสิทธิภาพและถูกต้องอย่างแม่นยำ
ข้อได้เปรียบทางเทคนิค:
สามารถปรับให้เข้ากับการเปลี่ยนแปลงอย่างรุนแรงในแสงสิ่งแวดล้อมและแทนที่แรงงานด้วยตนเอง
อัลกอริทึมการหลีกเลี่ยงแขนหุ่นยนต์อัจฉริยะและอัลกอริทึมการวางแผนวิถีการเรียนรู้บนพื้นฐานของการเรียนรู้อย่างลึกซึ้งสำหรับการตรวจจับวัตถุและการแปล
สามารถปรับให้เข้ากับสถานการณ์ที่มีการผลิตชิ้นงานหลายชิ้นพร้อมกัน
ค่าหลัก:
ลดต้นทุนและเพิ่มประสิทธิภาพปรับปรุงเสถียรภาพการผลิตอย่างรวดเร็วด้วยการทำงานที่ง่ายและปรับให้เข้ากับผลิตภัณฑ์ใหม่ได้อย่างรวดเร็ว
แผนนี้จะปรับปรุงประสิทธิภาพการดำเนินงานของสายการผลิตอย่างมีนัยสำคัญ ในขณะเดียวกันด้วยการวางตำแหน่งที่แม่นยำและเทคโนโลยีการจับความเสี่ยงของความเสียหายของผลิตภัณฑ์และการหยุดทำงานสายการผลิตสามารถลดลงได้ปรับปรุงคุณภาพของผลิตภัณฑ์และความมั่นคงในการผลิต นอกจากนี้ความสามารถในการปรับตัวให้เข้ากับสภาพแวดล้อมแบบไดนามิกและการควบคุมความเร็วที่มีประสิทธิภาพจะช่วยเพิ่มความยืดหยุ่นและความเร็วในการตอบสนองของสายการผลิตโดยตอบสนองความต้องการการผลิตที่เปลี่ยนแปลงอย่างต่อเนื่องของ GAC Toyota
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน
