










คิวอาร์โค้ด

เกี่ยวกับเรา
สินค้า
ติดต่อเรา

โทรศัพท์

อีเมล

ที่อยู่
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน

ภาพรวมโครงการ
โครงการนี้มีวัตถุประสงค์เพื่อออกแบบระบบชาร์จอัตโนมัติที่มีประสิทธิภาพและมีเสถียรภาพและมีเสถียรภาพเพื่อตอบสนองความต้องการในการชาร์จของลูกค้าภายใต้เงื่อนไขการผลิตในร่มในภูมิภาคชานซี ระบบจำเป็นต้องบรรลุการทำงานและการควบคุมยานพาหนะทางวิศวกรรมโดยไม่มีการควบคุมเฉพาะการจัดการและฟังก์ชั่นการชาร์จอัตโนมัติของคะแนน A และ B เพื่อให้เป็นไปตามข้อกำหนดการดำเนินงานอย่างต่อเนื่องของสายการผลิต
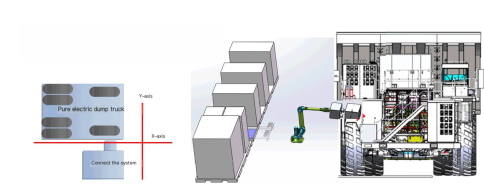
องค์ประกอบของระบบ
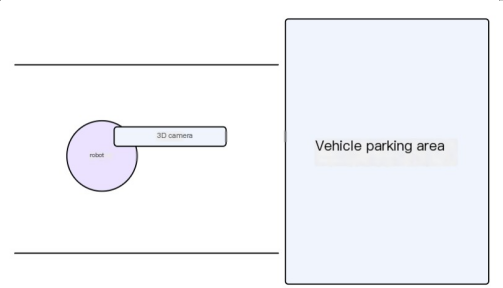
ระบบการวางตำแหน่งด้วยภาพ: การใช้กล้องที่มีความแม่นยำสูงและอัลกอริธึมภาพเพื่อให้ได้ตำแหน่งที่แม่นยำของพอร์ตการชาร์จบนรถบรรทุก ระบบภาพต้องมีความสามารถในการต้านทานฝุ่นและแสงแดดโดยตรงเพื่อให้มั่นใจว่าการทำงานที่มั่นคงในสภาพแวดล้อมในร่มต่างๆ
หุ่นยนต์และกลไกการผลักปืน: หุ่นยนต์อุตสาหกรรมที่มีช่วงแขน 3M ขึ้นไปถูกเลือกพร้อมกับกลไกการผลักปืนที่ออกแบบมาเป็นพิเศษ กลไกการผลักดันปืนควรมีแรงขับและความแม่นยำเพียงพอเพื่อให้แน่ใจว่าปืนชาร์จสามารถถูกต้องและแทรกเข้าไปในพอร์ตการชาร์จได้อย่างรวดเร็ว
ระบบการชาร์จ: ติดตั้งอุปกรณ์ชาร์จกำลังสูง 3 เมกะวัตต์เพื่อให้มั่นใจว่ารถดั๊มจะถูกเรียกเก็บเงินเต็มในช่วงเวลาสั้น ๆ และปรับปรุงประสิทธิภาพการผลิต
ระบบควบคุม: ผ่านระบบควบคุมแบบบูรณาการการควบคุมการวางตำแหน่งภาพที่แม่นยำการเคลื่อนที่ของหุ่นยนต์และกระบวนการชาร์จสามารถทำได้ ระบบควบคุมควรมีลักษณะอัตโนมัติและความฉลาดสูงและสามารถชาร์จอัตโนมัติได้
เวิร์กโฟลว์
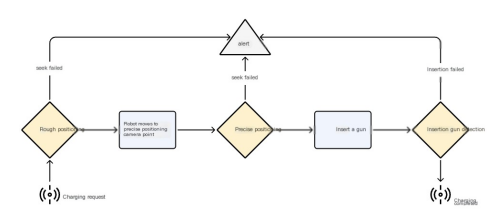
การวางตำแหน่งรถบรรทุกด้วยตนเอง: ระบุและค้นหาตำแหน่งพอร์ตการชาร์จของรถดั๊มพ์ผ่านระบบวางตำแหน่งภาพ
Robot Motion: ระบบควบคุมนำหุ่นยนต์ไปใกล้พอร์ตการชาร์จของรถดั๊มพ์ตามผลการวางตำแหน่งภาพ
การผลักดันปืน: หุ่นยนต์ติดตั้งกลไกการกดปืนซึ่งอย่างแม่นยำและใส่ปืนชาร์จเข้าไปในพอร์ตชาร์จของรถบรรทุกดั๊มป์ได้อย่างแม่นยำและรวดเร็ว
กระบวนการชาร์จ: ระบบชาร์จเริ่มชาร์จรถดั๊มป์จนกว่าจะถึงระดับพลังงานหรือเวลาที่ตั้งไว้ล่วงหน้า
การอพยพของหุ่นยนต์: หลังจากการชาร์จเสร็จสิ้นหุ่นยนต์จะอพยพพอร์ตการชาร์จและรอการมาถึงของรถบรรทุกถ่ายโอนข้อมูลถัดไป
เทคโนโลยีสำคัญ
เทคโนโลยีการวางตำแหน่งด้วยภาพ: การใช้อัลกอริทึมเช่นการเรียนรู้อย่างลึกซึ้งความแม่นยำและความเสถียรของระบบการวางตำแหน่งภาพสามารถปรับปรุงได้
เทคโนโลยีการควบคุมหุ่นยนต์: เพิ่มประสิทธิภาพวิถีการเคลื่อนที่ของหุ่นยนต์และความเร็วเพื่อปรับปรุงประสิทธิภาพการชาร์จ
การออกแบบกลไกการผลักปืน: ตรวจสอบให้แน่ใจว่ากลไกการผลักปืนมีแรงผลักดันและความแม่นยำเพียงพอในขณะที่พิจารณาความกะทัดรัดของโครงสร้างและความน่าเชื่อถือ
การตอบสนองต่อความเสี่ยง
การป้องกันสิ่งแวดล้อมในร่ม: ตรวจสอบสภาพแวดล้อมในร่มที่สะอาดและแห้งแล้งลดผลกระทบของฝุ่นและแสงแดดโดยตรงในระบบการวางตำแหน่งภาพ
การบำรุงรักษาฮาร์ดแวร์: รักษาฮาร์ดแวร์อย่างสม่ำเสมอและบำรุงรักษาเช่นหุ่นยนต์และระบบการวางตำแหน่งภาพเพื่อให้แน่ใจว่าการทำงานปกติของพวกเขา
การประเมินผลอย่างมืออาชีพ: เชิญผู้เชี่ยวชาญให้ประเมินและเพิ่มประสิทธิภาพกลไกการผลักดันปืนระบบชาร์จ ฯลฯ เพื่อให้แน่ใจว่าความปลอดภัยและความเป็นไปได้ของการแก้ปัญหา
ลำดับที่ 22, ถนน Hongyuan, กวางโจว, มณฑลกวางตุ้ง, จีน
